Kalibrierung & Bewegungen erstellen
Um ein einfaches Kalibrieren des Roboters sowie schnelles Programmieren von Bewegungen zu erlauben, wurde eine SW für den PC erstellt. Als Programmiersprache wurde hierfür Livecode gewählt, weil es einerseits Plattformunabhängig ist und andererseits Möglichkeiten zur einfachen GUI (Graphical User Interface) Erstellung bietet.
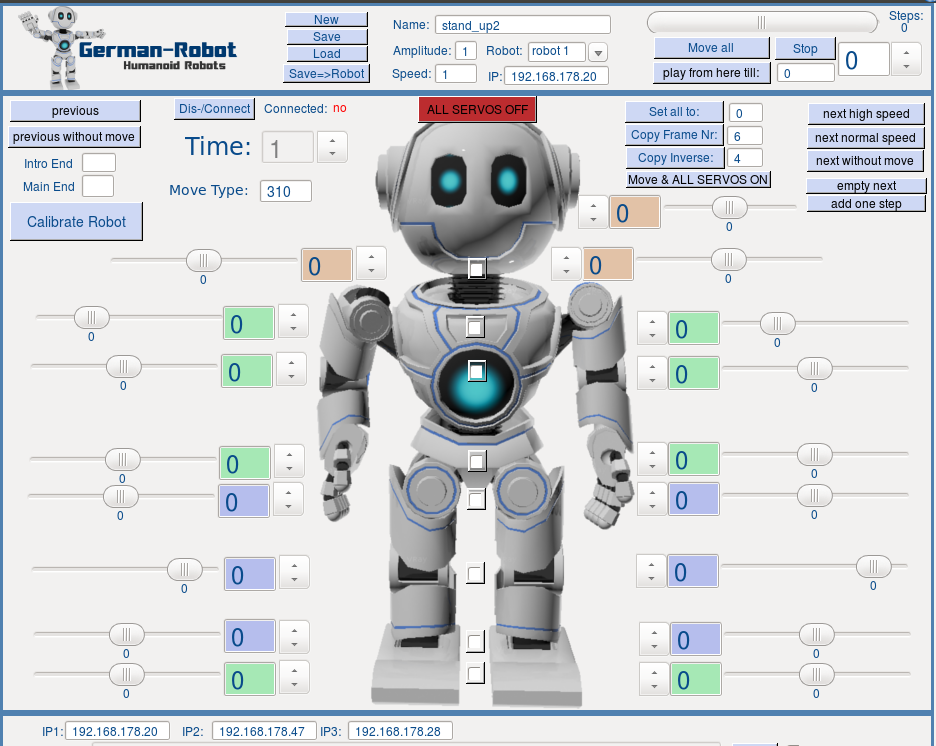
Im Bild sind neben den benötigten Knöpfen zur Erstellung und Speicherung der Bewegung insbesondere die 17 Schieberegler zu sehen, mit denen die Servos einzeln in die gewünschte Position gebracht werden können. Die 17 Servos verteilen sich wie folgt auf den Roboter: 5 je Bein, 3 je Arm und 1 im Kopf. Indem nun verschiedene Positionen (Winkel für jeden Servo) sowie die Zeit für den Übergang von einer Position in die Nächste eingegeben werden, entstehen Bewegungen, die abgespeichert und wieder abgerufen werden können. Hiermit sind auch Bewegungen wie Gehen möglich, allerdings müssen sie meist individuell auf den Roboter angepasst werden, da sich 2 Aufbauten eines Roboters und der Kalibrierung leicht unterscheiden können. Ausserdem bietet sich die Möglichkeit für jede Position einen Text einzugeben, der dann über TTS vom Roboter gesprochen wird.
Um eine neue Bewegung zu erstellen kann man wie folgt vorgehen:
- Der Roboter sollte über den Button “Dis-/Connect” mit dem PC verbunden sein (hierzu müssen Roboter und PC im selben WLAN Netz sein, siehe Anleitungen).
- Der Roboter muss calibriert sein, siehe Anleitungen.
- Klick auf “New”
- Eingabe eines Namens unter “Name”
- Klick auf “Move & all Servos on”. Dies schaltet alle Servos ein, der Roboter sollte in der neutralen Standposition sein, die Arme am Körper. (falls nicht, siehe Anleitung zur Kalibrierung)
- Bei Bewegung der einzelnen Schieberegler bewegt sich das entsprechende Gelenk
- Alle Schieberegler so einstellen, dass der Roboter in der ersten Position für die Bewegung ist (oft ist dies die 0 Position, so dass alles auf 0 bleiben kann…)
- Mit dem Button “Next normal speed” wird ein neuer Keyframe erzeugt. Hier wieder alle Schieberegler für die Position 2 einstellen und den Button “Next normal speed” erneut drücken. Dies wiederholen bis die Bewegung vollständig ist.
- Mit “Save” und “Save=>Robot” wird die Bewegung gespeichert und auf den Roboter übertragen
- Mit “Move all” kann die Bewegung abgerufen werden
- Soll eine andere Bewegung ausgeführt werden, die breits einmal auf den Roboter übertragen wurde, so geht dies indem man den Namen der Bewegung in das Feld “Name” eingibt und dann “Move all” drückt.
- Soll der Roboter etwas sprechen, so kann man dies unter “Text to speak” angeben (nicht im Screenshot, in der SW aber unten enthalten). Über den Button “Speak” kann man dies testen. Setzt man einen Haken bei “Wait for text”, so wartet der Roboter mit dem Aufrufen des nächsten Keyfremes bis der Text zuende gesprochen ist.
- Möchte man die Geschwindigkeit einer Bewegung ändern, so kann man das Feld “Time” anpassen. Dies ist die Zeit in Sekunden, die der Roboter für die Bewegung des aktuellen Keyframes zum nächsten benötigt.
- “Move Type” regelt die Beschleunigung der bewegung. Die erste Ziffer legt fest ob der Start der bewegung oder das Ende oder beides (3) beschleunigt durchgeführt werden. Die nächsten beiden Ziffern legen fest, wie viel Prozent der Bewegung beschleunigt ist (max 50).
Hallo
Ich finde euer Projekt super habe auch schon alle Teile Bestellt
Leider kann ich die Anleitung zum Laufen lernen nicht finden oder besser gesagt offnen
Habe auch leider ein Paar Probleme mit dem Lesen da ich leider aus der Generation Stamme die noch kein Englisch gelernt hat.
Habe aber eine Tochter die meine Begeisterung teilt und mir hilft.
Mit freundlichen Grüßen
Jörg Maienschein
Hallo Jörg,
vielen Dank für die Anfrage!
War mir gar nicht bewusst, dass ich dazu noch nichts geschrieben hatte, werde die Anleitung in den nächsten Tagen ergänzen! Die Sektion “Technik” habe ich gerade noch erweitert, hier stehen schon ein paar Hinweise.
Beim Englisch hilft teilweise auch der Google Translator https://translate.google.com/ , dort kann man auch eine Website eingeben (z.B. “www.german-robot.com/de/start/”), Google erstellt dann im Feld “Übersetzung” einen Link, der die Website mit übersetzten Texten anzeigt.
Ich wünsche dir viel Spaß beim Bauen, bei Fragen melde dich gerne!
Viele Grüße!
Johannes