Movement and speech creation
Sorry, this entry is only available in German. It can be translated in a few seconds, see “Support” section. For the sake of viewer convenience, the content is shown below …
Sorry, this entry is only available in German. It can be translated in a few seconds, see “Support” section. For the sake of viewer convenience, the content is shown below …
Manual Please read also the article text “Calibration Manual” on this website, it contains further information! (the pdf file “Calibration Manual” on that page can be read later…). Following parts …

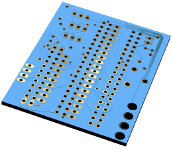
Please download the calibration manual here and additionally take the instruktions below into account: calibration 2016-05 Please connect the servos to the PCB as follows: Do not use the red …

Build Manual 2016-05 How to assemble the 3D printed plastic parts can be seen on the pictures and videos, see here. The speaker is assembled in the hole on the …
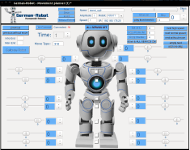
Manual Follow all the download instructions below. Enter the ip adress of the robot in “IP 1” Choose “robot 1” in field “robot” Click on “Dis-/Connect” => “Connected: no” should …
Download: This is the download page of the Open Source Humanoid “German-Robot”. Articles of c’t make and MagPi can be found here In case of problems, please use win32 …
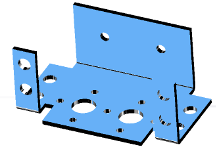
Manual Print the following parts yourself on a 3D printer or get them from an external 3D print service (see links below). The parts use the unit “mm”, usually you …
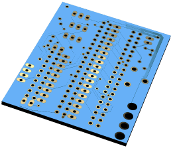
Manual You can order the needed PCB for example at one of the following links. Usually all standard settings will be fine, it is a 2 layer PCB. If you …
NOTE: The used RC-Servos that are mentioned below did break quite often. I recommend looking for more robust ones in the same standard size. I found this robot http://www.feetechrc.com/product/ft-robot/feetech-completely-assembled-bipedal-humanoid-robot-ft-17dof-sc-rtp/ to …